
In the proposed project WizFi360-EVB-PICO is used as a flight controller for a micro-drone which is controlled over WiFi via Android App.
COMPONENTS
Hardware components
WIZnet - WizFi360-EVB-Pico x 1
WizFi360 as WiFi Controller and telemetry and RP2040 for Flight Stabilization
dfrobot - 6 DOF Sensor - MPU6050 x 1
6 Axis IMU for flight stabilization
Software Apps and online services
Arduino - Arduino IDE
https://github.com/earlephilhower/arduino-pico
PROJECT DESCRIPTION
WizFi360 EVB PICO based Smartphone controlled Micro Drone for STEM Education
The idea is to develop WizFi360-EVB-Pico based Low Cost, open source, Smartphone controlled Micro Drone flight controller for STEM Education that supports the following features:
- Low-Cost STEM/STEAM kit that supports multiple flying model configurations.
- Reduce entry barrier costs associated with Aero modeling and Aerodynamics learning.
- Design a safe platform for kids and people in the surrounding.
- Easy to program and configure with sample codes of every sub-modules of the flight controller
Demo Video :
Hardware Used :
- WizFi360 EVB Pico: Flight controller firmware running on RP2040 and Control and telemetry over WiFi established with WizFi360 using AT Commands product link
- MT3608 Boost Converter: Convert 3.7 V LIPO voltage to 5V product link
- MPU6050: 6 Axis IMU for Flight stabilization in auto-level mode product link
- 7x20 3.7V 40000RPM coreless DC motor with 55 mm dia Prop (2 CW and 2 CCW) product link
- SI2302 N-Channel Mosfet as a coreless motor driver with 1N4148 diode. product link, product link
- 3.7v 300 mAh 20C Lipo battery, any 300-600mAh 3.7V >20C Battery works product link
Schematic / Connection of WizFi360-EVB-PICO Flight controller:

Implementation :
Motor Driver with MT3608 Boost Converter soldered on General purpose PCB.
MPU6050 IMU module soldered on top of WizFi360-EVB-PICO and foam tape used to damp vibration and avoid EMI interference from Boost converter.


Firmware:
The Firmware of the Drone is developed on Arduino IDE and Raspberry pi pico package,
Wizfi360 Arduino library not used instead UDP communication AP config done using bare AT commands of Wizfi360
Installed Raspberry Pi pico board package using the following guide.
https://github.com/earlephilhower/arduino-pico
and download the attached codes. That's it, no extra library is required.
Following WizFi360 AT Commands used for,
- Configure WizFi360 as a WiFi Access point
- Configure UDP Port to Listen to incoming control packets from Android Client and Transmit Telemetry to Android Client
AT+RST : Reset WizFi 360
ATE0: Echo Off
AT+CWMODE=2: AP Mode enable
AT+CWSAP_CUR="Wizfi360Drone","12345678",5,3,1,0: Create WizFi360Drone Access point with 12345678 Password and maximum one client connection accept
AT+CIFSR: Check whether the Access point was created or not and the IP Address of WizFi360
AT+CIPSTART="UDP","192.168.36.2",3333,2390,0: Create UDP Connection with Listen port 2390 and talking port 3333
AT+CIPSEND=3,"192.168.36.2",3333: Send 3-byte telemetry data (Battery Voltage and RSSI) to Android Client on Port 3333
The following code sample config AP starts the UDP server.
Serial2.setTX(4);Serial2.setRX(5);Serial2.begin(115200);delay(1000);Serial2.println("AT+RST");delay(1000);Serial2.println("AT+CWMODE=2");delay(400);Serial2.println("AT+CWSAP_CUR=\"Wizfi360Drone\",\"12345678\",5,3,1,0");delay(2000);Serial2.println("AT+CIFSR");delay(500);Serial2.println("AT+CIPSTART=\"UDP\",\"192.168.36.2\",2399,2390,0");//delay(1000);
The following code sample sends 3-byte telemetry to the Android client
Serial2.println("AT+CIPSEND=3,\"192.168.36.2\",2399");delay(10);Serial2.write(0x01);Serial2.write(rssi);Serial2.write(bat_voltage);
There are two codes available in the attachment,
- WIZDRONE_UDP.ino This sketch is used to debug Android app and drone communication over UDP
- WIZDRONE_MAIN_FLIGHTCONTROL_QUAD: this folder includes a sketch for the main flight controller .ino file and required header files
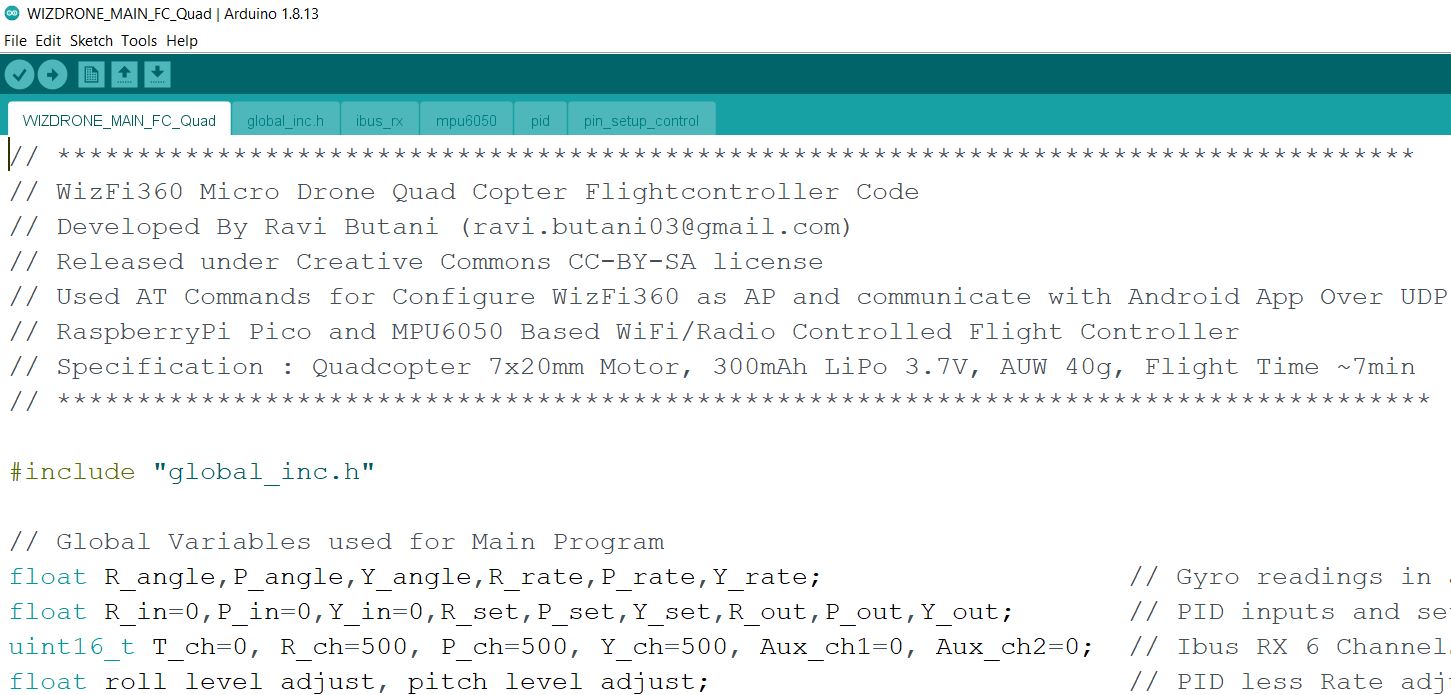
- WIZDRONE_MAIN_FC_Quad.ino - main flight controller firmware code, this code loops 250 times in a second.
- global_inc.h - this file includes pin definition, PID constants, limits, and other global variables
- pin_setup_control.ino - this file includes initialization of pins, PWMs, and functions related to control PWM and pins
- PID.ino - this file includes PID controller-related functions
- ibus_rx.h - this file includes AT-wrapped functions for config Wizfi360 as AP, receiving UDP control Packets from Android App, and sending telemetry to Android App. For simplicity, the UDP packet received from the Android app is converted to standard ibus limits.
- mpu6050.ino - this file handles all functions related to MPU6050 IMU like init mpu6050 with required accelerometer and gyro ranges, reading raw accelerometer and gyro values, computing angle by fusing accelerometer and gyro reading using a complimentary filter, etc.

Android drone controller App:
The .apk file for the drone is attached, this app is developed by me and it's in a very primitive stage. As it's debug mode .apk file please allow an unknown app source and debug mode in the Android app.

App features
- full roll, pitch, yaw, and throttle control using two thumb pads
- rate low for limited control authority, rate high for experts with the full control authority
- mode for throttle on the left/right side helpful for the left-handed and right-handed user
- telemetry includes battery voltage and RSSI
- flight timer
- arm/disarm slide button so no chance of accidentally arming the drone
- aux channels for future use
Drone Frame:
The frame for Drone is 3D printed using ABS plastic. The STL file is attached for reference. use 30 - 40 percent infill while 3d printing the frame to make the frame light and flexible yet strong enough to survive the impact.

Documents
Arduino Sample code for UDP Controller and telemetry on WIZFI360 DRONE:
Flight controller board schematic
Main Flight Stabilization Arduino code for WizFi360-EVB-PICO
WIZDRONE_MAIN_FLIGHTCONTROL_QUAD
WizFi360 Drone ABS plastic frame STL file
Make sure debug mode enabled / unknown source enabled
Android drone controller APK file
Credits

ravi_maker



Bonjour, vous serait-il possible de m'envoyer les fichiers car vos liens ne fonctionne plus, merci .WIZDRONE_UDP.ino
ReplyDeleteArduino Sample code for UDP Controller and telemetry on WIZFI360 DRONE
WizFi360 Drone FC Schematic
Flight controller board schematic
WIZDRONE_MAIN_FLIGHTCONTROL_QUAD
Main Flight Stabilization Arduino code for WizFi360-EVB-PICO
Frame STL file for 3d print
WizFi360 Drone ABS plastic frame STL file
Android drone controller APK file
Make sure debug mode enabled / unknown source enabled
I checked the links and they are working just fine. Just in case for whatever reason you cannot access, please find it here. https://drive.google.com/drive/folders/109OKk3UGEKYzzMSxle9joYwysantAmTR?usp=drive_link
Delete